
Várias pesquisas e fabricações de robôs voadores vêm tentando há anos reproduzir o comportamento dos insetos em pleno voo. A dificuldade não reside apenas no design físico, mas na capacidade de controle necessária do robô para manter estabilidade, velocidade e precisão em condições variáveis. Neste contexto, um novo robô desenvolvido nos Estados Unidos focou-se numa solução baseada em inteligência artificial que modifica a abordagem tradicional do controlo aéreo. O avanço permite analisar como a robótica de inspiração biológica começa a superar barreiras técnicas que pareciam difíceis de superar há apenas uma década.
Como é o robô que voa tão rápido quanto um zangão e como foi fabricado?
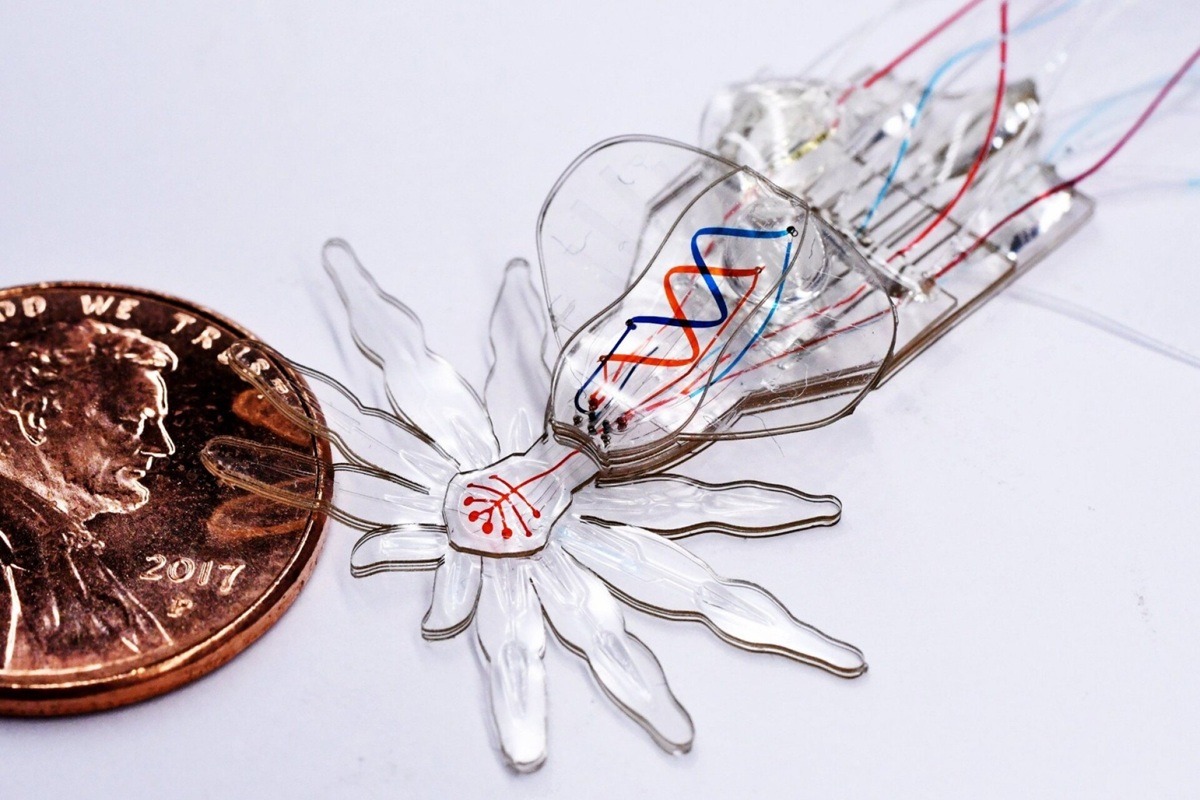
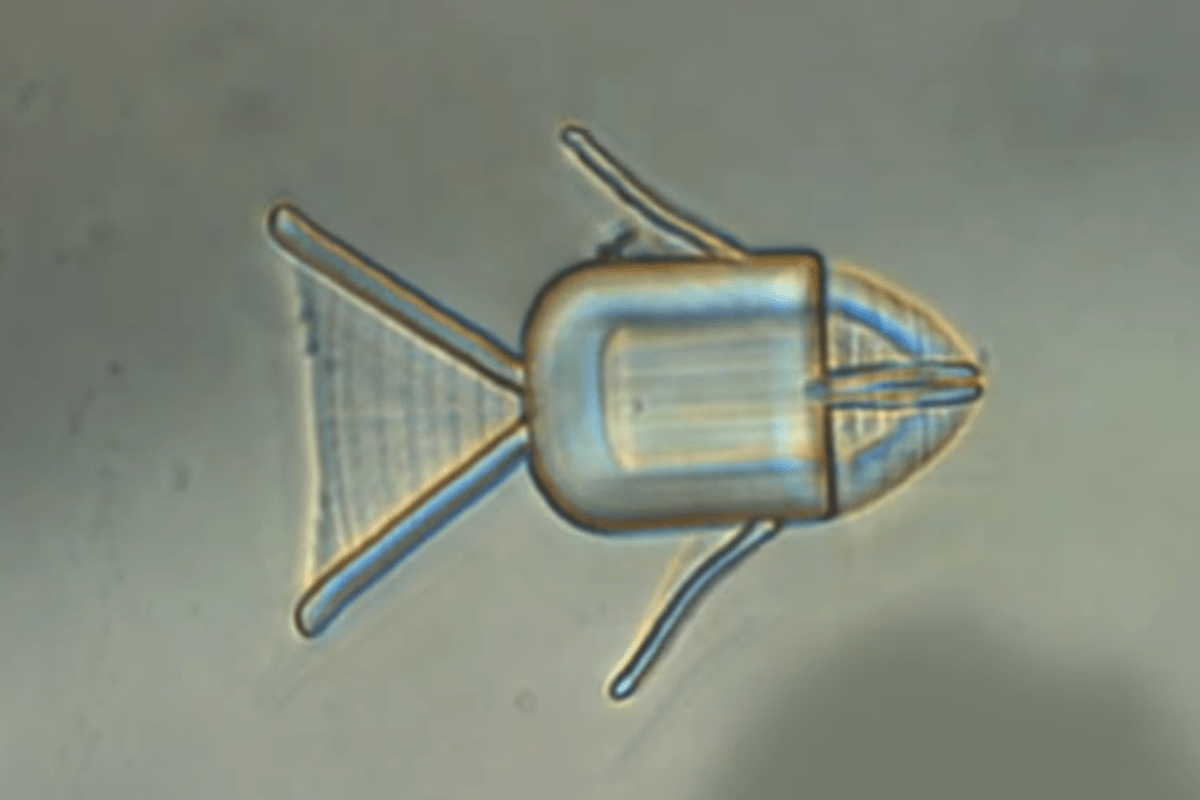
Após o primeiro marco experimental desse avanço tecnológico, o estudo foi publicado na revista Science Advances. Ele descreve como um robô do tamanho de um inseto consegue se deslocar com rapidez e manobrabilidade em espaços reduzidos, algo fundamental para futuras aplicações em cenários onde outros sistemas não podem operar. O robô, com um peso inferior ao de um clipe de escritório, utiliza asas batentes que imitam o movimento de um zangão.
Ao contrário dos microrrobôs anteriores, que só conseguiam manter trajetórias suaves e lentas, este modelo é capaz de executar curvas bruscas, mudanças de orientação e manobras acrobáticas sem perder estabilidade. Um dos aspetos mais relevantes é a sua capacidade de contornar obstáculos fixos e elementos em movimento. Esta qualidade abre a porta à sua utilização em contextos como estruturas desmoronadas após um terramoto, onde o acesso é limitado e o ambiente muda constantemente.
A inteligência artificial como cérebro deste robô voador
A chave do avanço está no sistema de controlo. O robô incorpora um controlador baseado em inteligência artificial que atua como seu cérebro, calculando em tempo real a posição, a velocidade e as ações necessárias para manter o voo. A equipa do Instituto Tecnológico de Massachusetts (MIT), liderada por Kevin Chen e Yi-Hsuan Hsiao, desenvolveu uma arquitetura dividida em dois níveis. Por um lado, um controlador preditivo gera trajetórias ideais, levando em consideração as leis físicas e as limitações do robô. Por outro lado, uma rede neural leve executa essas decisões quase instantaneamente.
De acordo com os dados do estudo, «graças a essa arquitetura, o robô melhora em 447% a sua velocidade e em 255% a sua aceleração». Este aumento permite realizaraté dez cambalhotas consecutivas em apenas onze segundos, mantendo um desvio mínimo em relação à trajetória prevista, mesmo com rajadas de vento. Esta abordagem resolve um dos grandes problemas históricos da microrrobótica: a necessidade de cálculos complexos que antes exigiam computadores externos pesados. A nova estratégia equilibra precisão e eficiência computacional.
Como é que este avanço poderia ser útil em futuros resgates e explorações?
O principal interesse deste tipo de robô não se limita à demonstração técnica. O seu tamanho e agilidade tornam-no um candidato para missões de busca e salvamento em ambientes inacessíveis. Num edifício em ruínas, por exemplo, estes robôs poderiam deslocar-se entre fendas, mapear o interior e localizar possíveis sobreviventes. Ao comportar-se de forma semelhante aos insetos, o robô pode adaptar-se melhor a correntes de ar imprevisíveis e espaços estreitos, onde os drones convencionais perdem estabilidade. Além disso, a sua estrutura leve reduz o risco de danos em caso de colisão. Os investigadores estão agora a trabalhar na integração de sensores e câmaras a bordo, com o objetivo de que o robô possa operar sem depender de sistemas externos de rastreamento.
Os limites atuais e os próximos passos deste robô voador
Apesar do avanço, o robô continua a ser um protótipo de laboratório. A autonomia energética, a resistência ao pó ou à humidade e a fiabilidade fora de ambientes controlados são desafios pendentes. Atualmente, o sistema de controlo é executado num computador externo, embora os autores indiquem que versões mais simples poderiam funcionar no próprio dispositivo. Por último, o estudo sublinha que a relevância da conquista não está apenas nas manobras acrobáticas, mas no que demonstra sobre o controlo em condições de incerteza. Se um robô à escala de um inseto pode manter a estabilidade em condições adversas, as possibilidades da robótica em áreas onde o tamanho e a precisão são determinantes são ampliadas.







